




V súčasnosti sa ľudia čím ďalej, tým viac zaoberajú nachádzaním nových zdroj energie. V dnešnej dobe sa najviac využívajú fosílne paliva ako je ropa, uhlie a zemný plyn. No tieto zdroje sú vyčerpateľné a ich množstvo neustále klesá a tým sa zvyšuje aj ich spotrebná cena.
Malý dôraz sa kladie na využívanie energie z obnoviteľných zdrojov, ktoré majú budúcnosť.
Táto práca obsahuje naše riešenie ako využiť čo najefektívnejšie jeden z obnoviteľných zdrojov energie, ktorú sme schopní zachytiť pomocou fotovoltaických článkov a premeniť na elektrinu. No problém je v tom, že slnko neustále mení svoju polohu a tým sa mení aj jeho uhol žiarenia na staticky umiestnený fotovoltaický systém. Tým, že slnko nesvieti priamo na tento solárny systém sa so zvyšujúcim uhlom znižuje efektivita takýchto fotovoltaických článkov. Toto je dôvod prečo by sme sa mali snažiť udržať fotovoltaický článok v priebehu dňa neustále natočený kolmo za slnkom.
Ja som vytvoril 2-osový automatizovaný fotovoltaický systém, kde tento panel udržuje pomocou PLC systému neustále natočený kolmo za slnkom a tým zvyšuje efektivita výroby elektrickej energie zo slnečnej energie.
Ja som sa rozhodol vytvoriť niečo, čo by pomohlo k tomu, aby sa viac a efektívnejšie využívala energia zo slnka. Slnko je relatívne stály a prakticky nevyčerpateľný zdroj energie, preto som sa rozhodol zamerať na jeho energiu, čiže solárnu energiu. Slnečná energia alebo solárna energia je energia získaná zo Slnka. Na Zem dopadá vo forme žiarenia. Vieme toto žiarenie pomocou fotovoltaických článkov premeniť na elektrickú energiu. Fotovoltaický článok funguje ako veľkoplošná polovodičová dióda, kde sa premieňa dopadajúce žiarenie na elektrické napätie. Na jednoduché a inteligentné riadenie som použili riadiaci systém PLC, ktorý je spoľahlivejší ako riadenie naklápania len optickými snímačmi.
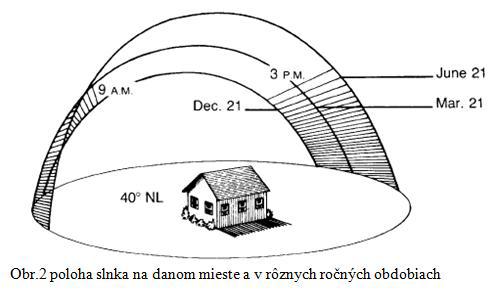
Je viacero druhov solárnych systémov. Jedným z nich je pevne ukotvený panel, ktorý nesleduje polohu slnka. Tieto systémy sa vyznačujú tým, že fotovoltaický panel je ukotvený na pevnom stojane. Systém musí byť nastavený tak, aby fotovoltaický panel mieril prednou stranou k juhu (azimutová orientácia) a jeho sklon bol taký, aby na pravé poludnie dopadalo slnečné žiarenie kolmo na plochu PV panela. Pre každú zemepisnú šírku je tento sklon iným, napríklad pre Slovenskú republiku je tento sklon približne 35-36°.
No existujú aj solárne systémy, ktoré dokážu sledovať polohu slnka a tým nastavovať uhol natočenia fotovoltaického článku tak, aby bol neustále natočený kolmo za slnkom. Tieto zariadenia sa taktiež nazývajú aj ako „Solárny tracker“. Sú dva druhy takýchto zariadení. Jeden spôsob je naklápať panel len v jednej osi, čiže v horizontálnej. Tieto trackery sú dosť nepresné a treba ich niekoľko krát ročne ručne pre nastaviť. Ďalším a lepším druhom trackerov sú tie, ktoré sú riadené v dvoch osiach čiže aj v horizontálnej a aj vertikálnej osi. Dvoj-osové trackery sú spoľahlivejšie a dokážu presnejšie udržiavať kolmé natočenie za slnkom. Spôsob riadenia/ovládania je z väčšej časti riešený pomocou snímačov intenzity svetla umiestnených v rôznych uhloch po okrajoch fotovoltaického článku. Pomocou rozdielov napätí sa spúšťajú pohony, ktoré prispôsobia natočenie panela polohe slnka.
Ale trackery, ktoré sú riadene len na základe snímačov intenzity svetla nie sú spoľahlivé. Problémom je, že keby som mal zostavenú elektráreň z množstva solárnych trackerov a každý z nich by bol riadený len na základe optických snímačov nedokázali by sme ovládať ako a kedy sa pre nastavuje poloha každého z nich. Keby sa neriadene spustili pohony na viacerých solárnych trackerov naraz, prúdový náraz ktorý by bol spôsobený spustením viacerých motorov by bol obrovský a naša elektrická sieť, ističe a všetky ochranné zariadenia by nemuseli vydržať takýto prúdový náraz. Ďalší problém je pri poruche. Keďže u trackerov riadených pomocou optických snímačov nie je možnosť vzájomnej komunikácie, prípadnú poruchu by sme zistili len pomocou neustáleho kontrolovania stavu každého trackera vizuálne človekom. Obrázky oboch druhov trackerov sú na obr.1.
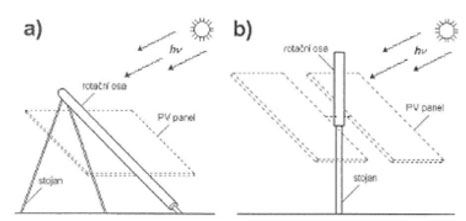
Obr.1 a) Jednoosový systém b)Dvojosový systém
Moje riešenie je v tom, že som inovoval spôsob riadenia a zmenil som zdroj informácie o polohe slnka. Ja nemeriam intenzitu svetla, ale na základe presného výpočtu viem určiť presnú polohu slnka a to bez ohľadu na počasie. Všetky na to potrebné výpočty za mňa vykoná PLC systém. Pomocou PLC systému dokážem riadiť, kedy a na ako dlho sa spustí či už horizontálny alebo vertikálny pohon. Dokážem komunikovať s našou solárnou elektrárňou pomocou PLC a prípadne poruchy zobrazovať na panely TD kde môže obsluha vidieť v akom stave sa samotný nakladací panel práve nachádza.
Samotné slnko a jeho pohyb na oblohe ľudí zaujíma už milióny rokov. V minulosti si ľudia mysleli, že slnko obieha okolo zeme, no dnes už vieme, že naopak Zem obieha okolo slnka. Pohyb slnka po oblohe je teda len zdanlivý. Tento pohyb však nie je chaotický ale má presné zákonitosti.
Poloha slnka sa dá presne zistiť pre dané miesto, hodinu a ročné obdobie. Toto je omnoho presnejšie a spoľahlivejšie ako klasické zisťovanie polohy slnka na základe optických snímačov. Ja som tieto výpočty využil pri realizácií môjho projektu. Na rôznych internetových stránkach sú voľne k dispozícii rôzne druhy programov, ktoré dokážu na základe daného miesta, hodiny a ročného obdobia presne určiť, kde sa bude slnko nachádzať.
Vytvoril som nosnú konštrukciu, ktorá udrží celý solárny panel a dokáže ho nastavovať do žiadanej polohy. Držiak v tvare písmena „U“ je prispôsobený pre solárny článok a pre jeho veľkosť. Tento držiak je umiestnený na oceľovej konštrukcií. Zariadenie je stabilné. Na tejto konštrukcií sú upevnené všetky motory a snímače. Celá konštrukcia je zobrazená na obr.3.

Pohony máme riešené dvoma 24V/DC motormi s prevodovkou, ktorá ma pomalé otáčky a veľký krútiaci moment.. Jeden motor riadi horizontálny uhol natočenia solárnej elektrárne. Tento motor je umiestnený v strednej časti zariadenia tak aby pohyboval vrchnou časťou na ktorej je umiestnený fotovoltaický panel (Obr.4). Druhý motor riadi vertikálny náklon panela a ten je umiestnený v hornej časti zariadenia(Obr.5). Riadenie smeru otáčania je riešené pomocou relé, ktoré podľa signálov z PLC motor prepoľujú a
tým nastavia smer, do ktorého sa motor bude točiť. Každý motor je riadený nezávisle na druhom motore.


Obr.4 Horizontálny motor Obr.5 Vertikálny motor
Na mojom zariadení mám umiestnené dva druhy snímačov a to koncové snímače a snímače uhla natočenia. Oba snímače fungujú na princípe vysielania a zachytávania infra svetla. Na každom je infra dióda, ktorá vysiela infrasvetlo a prijímač, ktorý ho príma. Striedavým prepúšťaním svetla do prijímača dostávame impulzy, ktoré využívam na zisťovanie uhla natočenia alebo na zistenie koncovej polohy. Impulzy dostávame vďaka tomu, že som si vyrobil optické pravítko striedavo nepriehľadné, ktoré sleduje optický snímač (viď. Obr.6,7). Snímače uhla natočenia dávajú signál PLC systému o uhle v akom sa práve môj panel nachádza a do akého uhla je potrebné ho dostať. Taktiež slúžia ako bezpečnostný prvok.

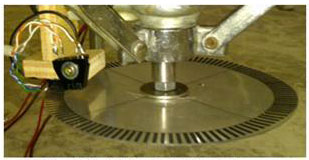
Obr.6 Optické snímače Horizontál Obr.7 Optické snímače Vertikál
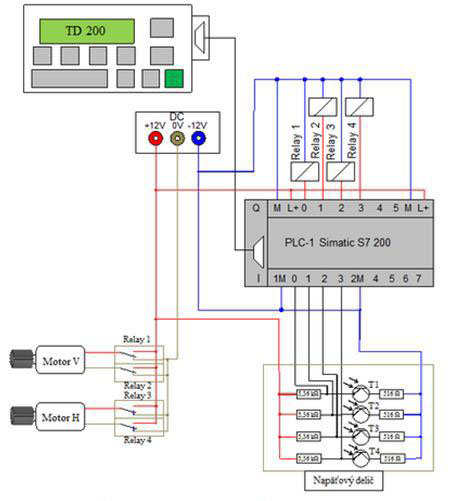
Obr.8 Schéma zapojenia do PLC systému
Tlačidlá na ovládacom panely majú tri funkcie. Prvá je funkcia ZAP. Táto funkcia privedie celé zariadenie do prevádzky a program začne rátať potrebné hodnoty pre spustenie pohonov a tie nastavia polohu solárneho článku tak, aby bol natočený kolmo na slnko.
Ďalej mám funkciu KALIBRACIA. Táto funkcia spôsobí to, že program presunie panel do počiatočnej polohy a nastaví hodnoty uhlov natočenia na počiatočné, od ktorých snímače budú počas funkcie meniť aktuálnu hodnotu uhla natočenia solárneho panelu. Toto slúži v prípade pozastavenia alebo poruchy zariadenia, keď chce obsluha opätovne uviesť zariadenie do chodu.
Posledná je funkcia VYP. Po stlačení tejto funkcie sa vypnú všetky pohony. Túto funkciu využije obsluha pri potrebe urýchleného zastavenia celého procesu v prípade viditeľnej poruchy alebo nebezpečenstva. Po odstránení poruchy alebo odstránení nebezpečenstva je potrebné znovu zapnúť funkciu ZAP. Keďže program neprestal rátať, vie aktuálnu polohu solárneho panelu a taktiež má vyrátanú aj žiadanú polohu, tak jednoducho dá príkaz pohonom aby presunuli panel do aktuálnej žiadanej polohy.
My v našom programe vieme nastaviť, aby natočenie solárneho panelu predbiehalo polohu slnka a niekoľko stupňov. Týmto dosiahneme, že aj pri menšom počte korekcií je odchýlka natočenia panela menšia a tým ušetriť energiu.
Môj program vie, kedy zapadne slnko a vďaka tomu vie, kedy má dať pokyn k návratu solárneho panelu do polohy, kde na druhý deň bude vychádzať slnko. Vďaka tomuto sa ráno nezdržujeme natáčaním solárneho panela ale tento panel už máme nastavený do žiadanej polohy takže panel je na slnko nastavený hneď pri východe slnka.
Motory mám v programe nastavené tak, aby sa nespúšťali naraz. Keďže u solárnych systémov, kde poloha panelu je nastavovaná pomocou snímačov intenzity svetla nie je možnosť riadiť, kedy sa spustia motory. Ak sa spustí viacero motorov naraz, prúdový náraz môže byť taký veľký, že poškodí elektrickú sieť. Naše riešenie je obrovskou výhodou u veľkých elektrárni s množstvom takýchto solárnych systémov.
Po spustení programu pomocou tlačidla ŠTART sa spustí celý cyklus počítania. Hneď po spustení sa na základe umiestnenia solárnej elektrárne, dátumu a času spusti rátanie polohy slnka. Po dokončení výpočtu program vydá signál pohonom na vykonanie pohybu do určenej strany. Pohony kontrolovane snímačmi začnú nakláňať panel tak aby bol nastavený kolmo na slnko.
Po presune o daný uhol sa motory vypnú a panel ostane nastavený. Výpočet sa opakuje každú hodinu a taktiež sa aj každú hodinu vykonáva podľa potreby pohyb na optimálnu pozíciu. Takto to pokračuje po dobu, pokiaľ je v danom ročnom období slnko na oblohe.
Ak program povie, že slnko už zapadlo, tak sa zopnú pohony, ktoré nastavia panel do polohy tak, aby ráno pri východe slnka už bol panel nasmerovaný správne.
Tento cyklus sa opakuje každý deň.
Moja solárna elektráreň musí mať množstvo bezpečnostných opatrení aby bola zaručená jeho bezpečná činnosť. Jedným zo zabezpečovacích prvkov je, že ak vydá PLC systém signál pohonom k pohybu ale aj napriek tomu snímače uhlu natočenia neprijímajú žiadny signál vyskočí na ovládacom panely chyba. Táto chyba značí, že je poškodený buď motor alebo snímač uhla natočenia.
Druhým spôsobom ochrany je, že ak zadáme pohonom, aby nastavili panel do novej polohy, ale napriek tomu do určitej doby nedostane PLC signál od koncového snímača, tak na ovládacom paneli vyskočí chyba a celé zariadenie sa okamžite vypne. Táto chyba značí buď poruchu koncových snímačov alebo poruchu motorov. Týmto zabránime nekontrolovanému otáčaniu solárneho panelu jedným smerom.
Po zistení chyby sa zariadenie vypne a čaká na ďalšie pokyny od obsluhy.
Po navrhnutí tohto solárneho systému sa mi ho aj podarilo úspešne realizovať. Zhotovil som nosnú konštrukciu, ktorá drží môj solárny panel. Na tejto konštrukcií sú miestnené dva motory, ktoré pomocou PLC systému menia uhol natočenia solárneho panelu voči slnku. Tento pohyb je možný v rozsahu 90° vo vertikálnej osi a 200° v horizontálnej osi. Takýmto nastavovaním solárneho článku sa zvýši produkcia elektrickej energie v lete až o 50% a v zimných mesiacoch o 20%( Obr. 12). Podľa môjho názoru, keď už postavíme niekde solárne systémy, mali by sme sa snažiť ich plochu využiť čo najviac je len možné. Tým, že môj systém riadim pomocou PLC som uľahčili obsluhu, údržbu a riadenie celého zariadenia. Obsluha môže riadiť moju solárnu elektráreň z jedného miesta a to za pomoci ovládacieho panela.
Vďaka tomu, že spúšťanie pohonov mám presne riadené, viem povedať, kedy sa ktorý spustí. Týmto som eliminoval jednu z nevýhod neriadených solárnych elektrárni a to, neriadené spúšťanie motorov. Pri mojom zariadení sa nemôže spustiť viacero motorov naraz a tým nám prúdový náraz pri zapnutí motora nemôže preťažiť energetickú sieť.
Obsluha nemusí pravidelne vizuálne kontrolovať zariadenie. Pri prípadných poruchách ju o tom PLC systém oboznámi prostredníctvom výstražného hlásania na ovládacom paneli. Môj riadiaci systém v tomto prípade aj bezpečne pozastaví prevádzku solárnej elektrárne do doby, kým obsluha neodstráni chybu a nedá pokyn k uvedeniu zariadenia do opätovnej prevádzky.
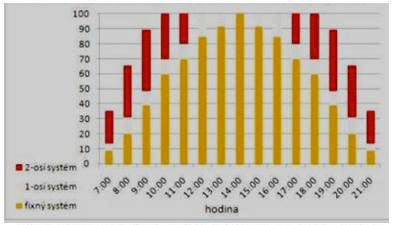
Obr.9 Porovnanie dennej produkcie solárnych systémov
