




Zima je tu zas a s ňou aj pekná snehová nádielka. Asi každý z nás už zažil to úmorné a zdĺhavé odpratávanie snehu.
Keďže v zime je niečo také u mňa skoro každodenná realita a na to, aby som každé ráno vstával z vyhriatej postele, teplo sa obliekol a vzal do rúk lopatu som až príliš lenivý, rozhodol som sa túto nie veľmi jednoduchú a nezáživnú prácu trochu mechanizovať .
V tejto práci popisujem návrh a samotnú konštrukciu robotického odhŕňača snehu, ktorý by sa mal dať v konečnom výsledku využívať aj na iné úlohy. Po odstránení snehovej radlice vznikne pásové vozidlo schopné prekonávať aj nespevnené a nerovné podložie a pritom uniesť veľké množstvo nákladu či už na svojej vrchnej časti, alebo za ním pripojenom návese. Teda výsledkom je vozidlo, ktoré by mohli využívať policajti, hasiči ako záchranné vozidlo, ale aj armáda v nebezpečných oblastiach. A taktiež sa dá využívať na zábavné činnosti ako je odpratávanie snehu, vozenie ťažkého nákladu a podobne ...
V úvode by som ešte rád spomenul, že pre nedostatok financií som sa celú konštrukciu snažil postaviť z dielov, ktoré sa mi povaľovali doma, alebo z dielov, ktoré sú ľahko dostupné za malý peniaz. Preto som si vedomý toho, že nie všetky časti, a vyrobené diely sú konštrukčne navrhnuté správne a presne. Ale vďaka tomu ma robot malé konštrukčné náklady a dá sa ľahko skonštruovať čo je v konečnom dôsledku plus.
Pri zostavovaní práce som využil viacero metód. V prvom rade to bolo štúdium literatúry a dostupných článkov na internete, diskusia v rôznych diskusných kluboch zaoberajúcich sa problematikou elektrických motorov, ich konštrukcie a použitia. V nasledujúcich etapách som kombinoval metódu komparácie ( porovnávania) dostupných dokumentov a informácií o jednotlivých častiach môjho zariadenia a konštrukcii tohto zariadenia. Samozrejme, v procese sumarizácie zozbieraných faktov som využíval metódu analýzy pri vyhodnocovaní jednotlivých informácií aj metódu syntézy pri vytváraní ucelenej predstavy o konštrukcii a praktickej aplikácií skonštruovaného zariadenia.
Predložená práca pozostáva z piatich hlavných kapitol. Úvod práce obsahuje dôvody, ktoré ma ovplyvnili pri výbere danej témy. V prvej číslovanej kapitole s názvom Metodika práce uvádzam stručnú charakteristiku jednotlivých kapitol. Táto časť popisuje postup a všetky metódy výskumu a interpretácie pri písaní práce. V druhej kapitole popisujem konštrukciu podvozku. Tretia kapitola sa zaoberá pohonom a riadením skonštruovaného odhŕňača snehu a riešením problémov, ktoré pri konštrukcii vznikali. Štvrtá kapitola sa zaoberá brzdením zariadenia a z toho vyplývajúceho riadenia pohybu zariadenia. V piatej časti vysvetľujem a popisujem spôsoby napájania zariadenia. Záver je venovaný hodnoteniu splnených cieľov a možnému rozšíreniu práce. Vo foto dokumentácií sú fotografie z priebehu tvorby práce.
Pre vysoké nároky či už na priechodnosť, pohyblivosť alebo ovládateľnosť v zložitom a často krát nespevnenom povrchu som zvolil pásový podvozok. Jeho hlavnou výhodou je menšia citlivosť na kvalitu terénu oproti bežným kolesovým podvozkom, čo má za následok väčšiu priestupnosť hlavne ťažkým terénom. Ďalšie veľké plus je veľká styčná plocha, ktorá je potrebná predovšetkým pri pohybe na nespevnenom povrchu.
Celý podvozok je navrhnutý a skonštruovaný tak, aby dokázal prekonávať určitý sklon terénu a to aj pri jeho členitosti a nerovnostiach .
Samotná konštrukcia rámu podvozku je zostavená z presných profilov typu L, ktoré sú dokopy zvarené a tvoria hlavnú nosnú časť . V ňom je usadená nosná podložka, na ktorej sú upevnené jeho hlavné časti, ako je diferenciál, motor .... Takáto konštrukcia vykazuje vysokú pevnosť a tuhosť pri zachovaní minimálnej hmotnosti s prihliadnutím na rýchlu a jednoduchú montáž. Celkové rozmery rámu bez pasov sú 80 x 50 cm.
Na pozdĺžnych stranách sa ďalej nachádzajú hnané alebo vodiace valce, po ktorých obiehajú pásy, ktoré sú poháňané hnacím ozubeným kolesom.
Ako som už spomínal robot na prenos energie z motora na podložku využíva pásy, vďaka čomu dosahuje vysokú ťahovú silu. Použitie pásu ďalej zvyšuje jeho nosnosť a stabilitu .
Preto aj chovanie celého podvozku do značnej miery ovplyvňuje výber pásu. Ja som ako pásy použil valčekovú reťaz 08 B3. Bolo to jednoduché a hlavne účinné riešenie, pretože reťaz sa vyznačuje dobrou ohybnosťou, dlhou životnosťou a hlavne nemá veľké nároky na údržbu .
| Svahová dostupnosť (°) | 45 |
| Zaťažiteľnosť (kg) | 270 kg |
| Rozmery (cm) | 100 x 80 |
| Hmotnosť (kg) | 100 kg |
Tab. 1: Základné technické parametre odhŕňača snehu
Pre pohon celého podvozku som po dlhšom uvažovaní zvolil rotačný jednosmerný elektromotor. Túto možnosť som zvolil pre jeho jednoduchosť, univerzálnosť a hlavne veľký záberový moment, čo je potrebné pre pohyb robota z miesta v nespevnenom alebo nerovnom povrchu. Tým pádom, že robot bude poháňaný elektromotorom bude do značnej miery aj ekologický čo pôvodne nebolo zámerom ale nakoniec je to veľké plus celej konštrukcie, keďže sa dnes veľa hovorí o globálnom otepľovaní dôsledkom spaľovania fosílnych palív, ktoré produkujú veľké množstvo NOX, CO, CO2 .
Motor o napájaní U = 48V jednosmerných pri odbere prúdu I = 4A dodáva 100W výkonu pri 6000 ot/m. Výstup hriadele motora je prepojený so vstupom do prevodovky, ktorá má prevodový pomer 120:1. Na výstupe z prevodovky sa nachádza hardy spojka, ktorá prenáša výkon motora na vstupnú hradiel diferenciálu, ktorý ďalej rozvádza výkon motora na pásy podvozku. Pri pohybe robota vzniká prevod aj na súkolesí stáleho prevodu keď sa výkon prenáša z pastorka na tanierové koleso diferenciálu v mojom prípade to činí prevod 3:1.
Základné údaje pre rotačný jednosmerný elektromotor:
| Napätie DC (V) | 48 |
| Výkon (W) | 100 |
| Krútiaci moment (Ncm-1) | 95 |
| Otáčky (min-1) | 6000 |
| Hmotnosť (kg) | 3,7 |
Tab.2: Technické parametre rotačného jednosmerného motora
Pri navrhovaní podvozku som sa stretol aj s problémom ako vyriešiť riadenie. Keďže celý robot je sám o sebe originál, tak som sa na literatúru veľmi spoľahnúť nemohol pretože žiadne použiteľné podklady som nenašiel a tak som musel vymyslieť niečo sám. Nápadov bolo mnoho napr. použiť viac motorov na pohon, pre každý pás jeden.... a podobne.
Nakoniec som prišiel s nápadom použiť na riadenie diferenciál. Daný diferenciál som rozobral a na planétové kolesá som pripevnil hnacie hriadele , ktoré sú ukončené ozubenými hnacími kolesami. Ozubené hnacie kolesá zachytávajú a posúvajú pásy, výsledkom je pohyb robota. Na hnacích hriadeľoch sa nachádzajú aj bubny čeľusťových bŕzd, ktoré slúžia na zabrzdenie jednej strany pričom druhá strana zotrváva v pohybe a to ma za následok otáčanie podvozku (princíp tanku).
Pri priamej jazde sú otáčky oboch hnacích hriadeľov rovnaké. Otáčky aj hnací moment sa prenášajú z pastorku na hnacie koleso stáleho prevodu, pevne spojené s klietkou diferenciálu, s ktorou sa spoločne otáčajú.
Otáčky sa prenášajú cez satelity na planétové kolesá. Satelity sa točia spolu s klietkou, ale neotáčajú sa na svojich čapoch. Planétové kolesá majú rovnaké otáčky ako klietka diferenciálu a krútiaci (hnací) moment sa rozdeľuje rovnomerne na planétové kolesá a cez hnacie hriadele na pasy podvozku.
Ak zabrzdím jednu stranu potom, satelity sa točia s klietkou diferenciálu, ale tentoraz sa súčasne točia na čapoch satelitov a tým vyrovnávajú zabrzdenie jednej strany pričom krútiaci (hnací) moment sa prenáša iba na nezabrzdenú stranu.
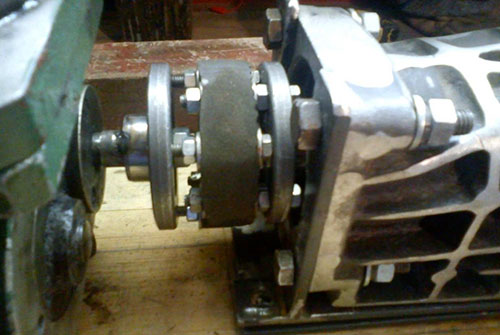
Ďalší z mnohých problémov, ktoré som riešil bolo brzdenie jednotlivých hnacích hriadeľov. Ako to už pri prototype býva, tak aj tu bolo veľké množstvo dielov vyrobené po hodinách skúšania a vývoja na mieru, výnimkou neboli ani čeľusťové brzdy, ktoré teraz zabezpečujú riadenie a zabrzdenie podvozku. Brzdenie hnacích hriadeľov je uskutočňované pomocou brzdových bubnov, ktoré sa nachádzajú priamo na hnacích hriadeľoch. Tieto brzdové bubny obopínajú brzdové čeľuste, ktoré sú k sebe priťahovane pomocou cievky z motorového spúšťača napájané batériovým napätím o napätí U=12V . Princíp funkčnosti (Vid. Obr.1) .
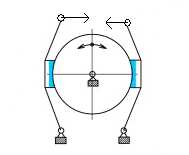
Obr.1 Brzdy
V ďalšom vývoji robota na ňom pribudnú rôzne elektrické stroje a prístroje. Rôzne svetlá, aby bol pri práci dostatočne a zreteľne osvetlený, riadiace prvky ovládania, ovládacie a signalizačne prvky, riadiace systémy osvetlenia, ale aj riadenie chodu elektrického pohonu a ďalších pomocných a podporných systémov.
Ako zdroj napájania pre môjho robota som sa rozhodol použiť trakčný akumulátor o napätí 12V a kapacite 100Ah, ktorý by mal dostatočne poslúžiť nato aby robot zotrval v prevádzke niekoľko desiatok hodín a vďaka svojej váhe dostatočne zaťažil prednú časť podvozku, čo priaznivo vplýva na stúpanie robota do svahu pod uhlom aj niekoľko desiatok stupňov.
Už pri výbere elektronických komponentov som sa snažil brať do úvahy tu skutočnosť že napájacie napätie bude 12V a tak vyberať diely ktorým toto napätie postačuje. Ale nie vždy sa to dalo a tak má určite množstvo elektronických komponentov má zabudované vlastné stabilizátory alebo násobiče, pre ich malé odbery prúdov to postačuje.
Omnoho závažnejší problém prišiel keď som začal riešiť napájanie hlavného elektrického pohonu. Ako už som vyššie uviedol motor požaduje napájanie 48V jednosmerných. A ako je všeobecne známe jednosmerné napätie sa nedá transformovať.
Bolo potrebné skonštruovať DC-DC menič.
Navrhol som striedač, ktorý rozpulzuje jednosmerné napätie na frekvenciu 50Hz, ktoré sa dá ďalej transformovať . Hneď potom som navrhol jednofázový jadrový transformátor ktorý mal primárnu stranu prispôsobenú na vstup Uvst.=12V a sekundárnu stranu opúšťalo napätie o hodnote Uvýst.=48V potrebných na napájanie hlavného pohonu.
Ďalším dielom ako osvetlenie alebo cievky čeľusťových bŕzd napájacie napätie 12V postačovalo a tak nebolo potrebné nič meniť ani dopĺňať.
Po kompletnej príprave všetkých elektrických dielov som mohol začať so zapájaním elektroinštalácie.
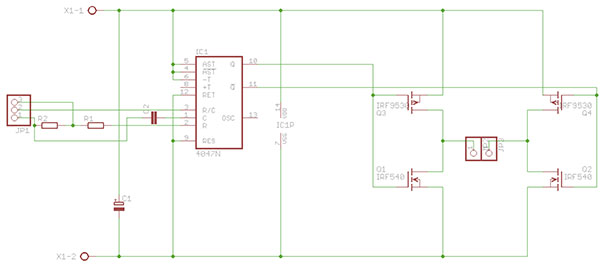
Obr.2 Schéma meniča
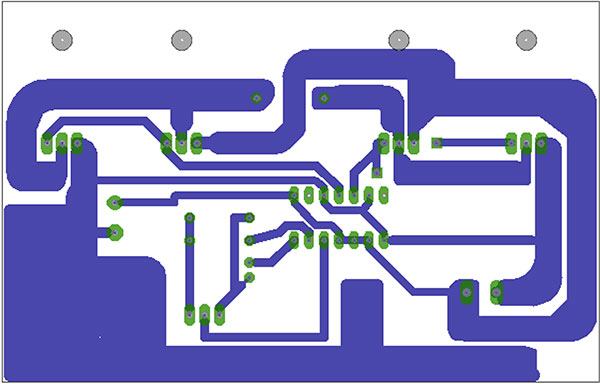
Obr.3 Navrhnutý plošný spoj meniča
Výsledkom mojej práce je funkčný mechanický model robotického odhŕňača snehu a taktiež riadiaca a výkonová elektronika . V práci je popísaná funkčnosť a jeho ďalšie možnosti využitia. Vďaka jednoduchosti konštrukcie a nízkym nákladom na zhotovenie sa toto zariadenie dá využiť aj ako učebná pomôcka.
Už počas konštrukcie, ale aj pri skúškach sa začali objavovať nečakané a nepredvídateľné problémy, pričom som zistil, že s použitým motorom má vozidlo málu prevádzkovú rýchlosť a jeho hmotnosť sa zvýšila natoľko že dochádza k neustálemu prehrievaniu súčiastok a nasledovnému zničeniu.
Preto by som chcel v ďalšom pokračovaní na tejto práci vykonať zmeny v prevodovom mechanizme, vo výkonovej elektronike, kde by som navrhol dostatočné prúdové obmedzenie, ale aj ďalej zdokonaľovať a vyvíjať celé vozidlo tak aby v konečnom dôsledku dokázalo samočinne tvoriť statické trajektórie na základe statického modelu.
Po výše ročnej práci v dielni a za počítačom som získal veľké množstvo či už teoretických, alebo praktických vedomosti, stretol som sa s veľkým množstvom problémov, ktoré ma naučili vynaliezavosti a technickému mysleniu.
Keďže na práci stále pracujem a inovujem, určite tam pribudnú prvky, ktoré zvýšia komfort prevádzky môjho zariadenia. Prípadné doplnenia práce budú súčasťou prílohy dokumentácie.


Kompletný podvozok


Výroba rámu


Usadzovanie diferenciálu a hnacích hriadelí

Výroba hardy spojky

Usadenie motora

Nasadenie pásov a výroba napínača pásov
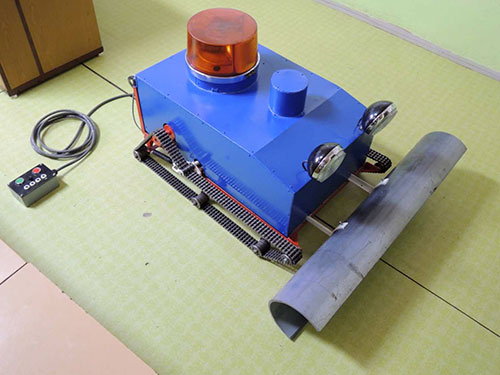
Kompletný ROS 2014
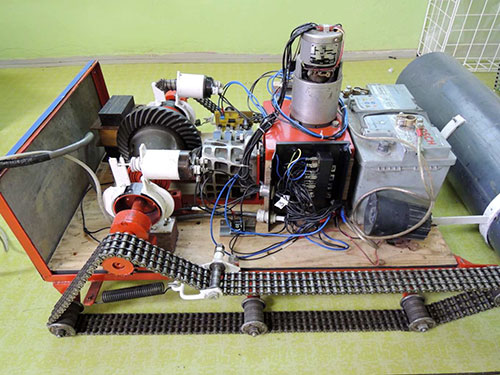
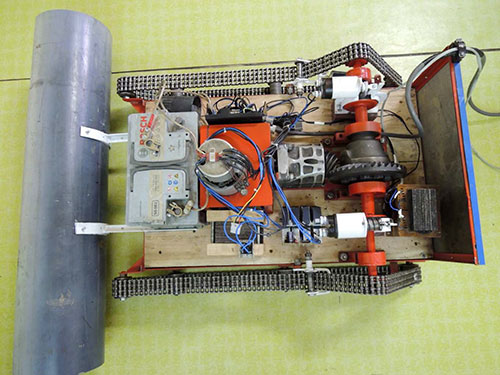
Pohľad do vnútra ROS 2014
