




Technológia trieskového obrábania sa začala vyvíjať v 18. a 19. storočí. Prvé stroje boli ovládané len mechanicky, ale s príchodom elektromotorov začali vznikať prvé NC stroje. Boli riadené jednoduchým riadiacim systémom s elektrónkovými obvodmi. Program bol uložený na mechanických pamätiach (vačky, mechanické zarážky, dierne pásky,...). Pre zefektívnenie výroby sa začali na NC stroje postupne pripájať počítače a tým vznikli prvé CNC stroje. Počítač urýchlil a zjednodušil programovanie, riadenie stroja, uchovanie dát,... Výroba sa stala lacnejšou, kvalitnejšou a výkonnejšou. Aj po toľkých rokoch vývoja na týchto strojoch, sa stále nájdu veci a nové riešenia, ktoré zas posunú tento odbor o krok vpred.
Pre výrobu vlastnej CNC frézky som sa rozhodol preto, lebo ma tieto stroje zaujali na odbornej praxi. Fascinovalo ma, ako sa zo súčiastky nakreslenej v CAD programe stala reálna súčiastka. Vyzeralo to celkom jednoducho, no až pri tejto práci som pochopil, že to zo začiatku až také jednoduché nie je. Dlho som rozmýšľal nad tým, aký mikrokontrolér použijem, ale rozhodol som sa pre Arduino Mega 2560, pretože je lacné, ponúka dosť vysokú rýchlosť a je to obľúbená „hračka“ amatérskych programátorov.
Základné parametre CNC frézky:
• Rozmery stroja (Š x D x V): 620x710x630mm
• Rozmery pracovnej plochy (Š x D x V): 420x340x150mm
• Váha: cca 60kg
• Výkon vretena: 710W
• Otáčky vretena: 10 000-30 000ot./min.
• Spúšťanie vretena pomocou relé
• Napájanie: 220V, 50Hz
• Zdroj: CP12060D20, Output: +12V= 5A, 60W
• Mikrokontrolér: Arduino Mega 2560
• Ovládače krok. motorov: TB 6560
• Krokové motory: NEMA 23
• Posuvy sú realizované pomocou trapézových tyčí a ozubených remeňov
• Prenos dát z PC do frézky pomocou USB portu
Mechanická časť
1. Návrh rozmerov pracovnej plochy, návrh a rozloženie súčiastok (motory, vedenia, remene,...)
2. Vyhotovenie rámu
3. Os X- uchytenie lineárnych vedení, motora a remeňa
4. Os Z- uchytenie lineárnych vedení, trapézových tyčí a matíc, uchytení vodiacich tyčí na os Y
5. Os Y- uchytenie motora, napináku remeňa, uchytenie remeňa na lineárne ložisko
6. Montáž reduktora na motor (os Z)
7. Kompletná demontáž, striekanie rámu, montáž
8. Montáž krytov, plechov a plexiskla
Elektrická časť
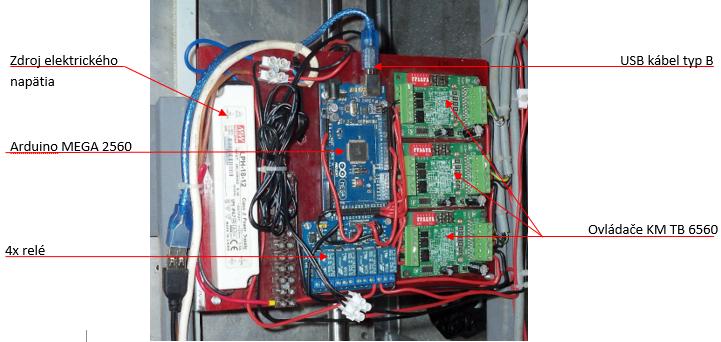
1. Montáž zdroja, mikrokontroléra, ovládačov motorov, relé, káblov,...
2. Spojenie mikrokontroléra s počítačom
3. Nahranie GRBL Konečné nastavovanie parametrov
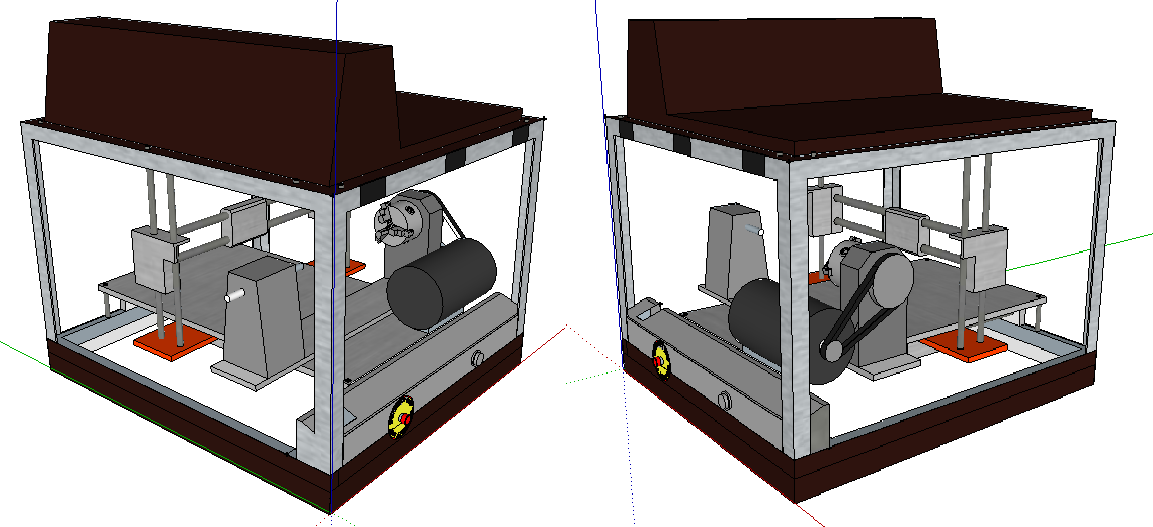
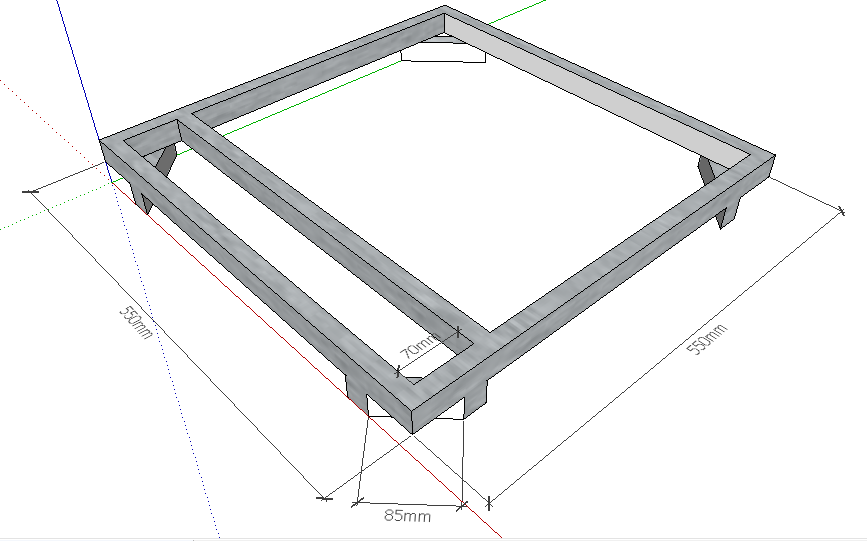
Pracovná plocha má rozmery 420x340mm, podľa hliníkového stola. Návrh mechanickej časti frézky som nakreslil v programe SketchUp 2017.
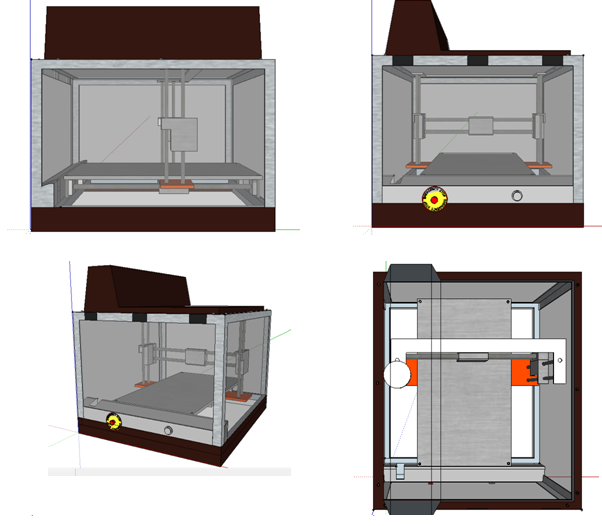
2. Vyhotovenie rámu
Na vyhotovenie rámu som použil tenkostenné oceľové uzavreté profily s obdĺžnikovým prierezom- 30x20x2 (EN 10219), ktoré som zvaril elektrickým oblúkom, obalenými elektródami. Rozmery základne rámu sú 550x550mm.
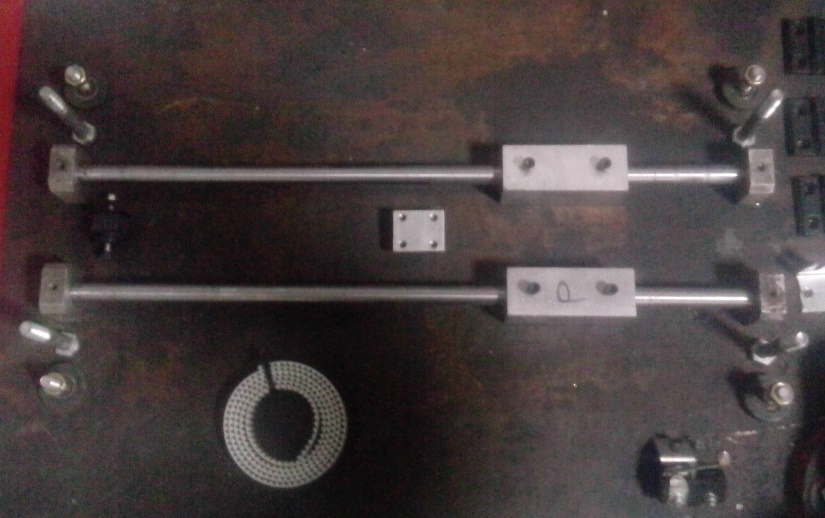
Na osi X sú dve lineárne tyče (16mm) spolu s guličkovými lineárnymi ložiskami. Na týchto ložiskách je prikrútená železná platňa. Posuv je realizovaný ozubeným remeňom HTD5M-15mm.
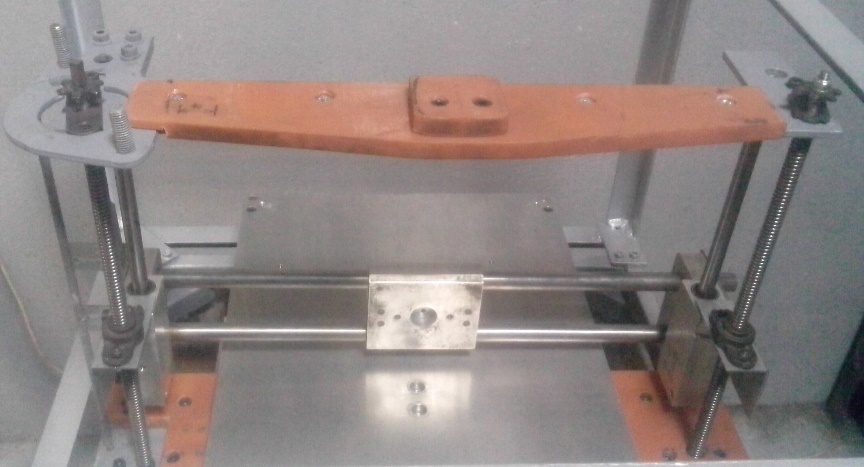
Táto os je primontovaná na platni na osi X. Ako aj na ostatných dvoch osiach mám posuv realizovaný pomocou ozubených remeňov, tak aj tu som chcel použiť tento remeň. No po montáži a následnom skúšaní som zistil, že nie je vhodný pre túto os v kombinácii s motorom NEMA 23. Tento motor nemá dostatočný krútiaci moment a pri zaťažení, často táto os padala. Následne som sa rozhodol, že radšej použijem trapézové závity z oboch strán. Tieto závity sú vzájomne spojené reťazovým prevodom.
Na túto os som vyrábal diely: držiak motora, napinák remeňa, uchytenie remeňa na klzné lineárne ložisko. Aj tu som použil vodiace tyče s priemerom 16mm.
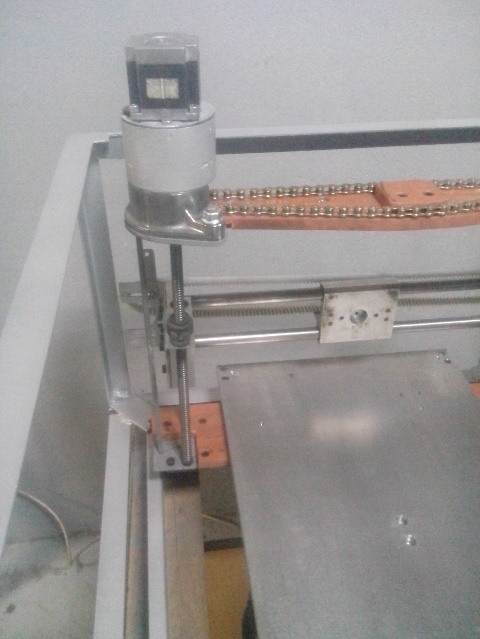
Keďže ani po vymenení ozubeného remeňa za trapézové závity, motor nemal dostatočný krútiaci moment na zdvihnutie, musel som hľadať náhradné riešenie. Mal som na výber z dvoch možností:
1. Kúpa motora s väčším krútiacim momentom (NEMA 34)
2. Montáž reduktora na pôvodný motor (NEMA 23), pre zvýšenie krútiaceho momentu
Vybral som si možnosť č.2, pretože výberom možnosti č. 1 by som musel kúpiť nový motor NEMA 34 a spolu s ním aj nový zdroj a ovládač tohto motora, keďže tento motor potrebuje prúd 5,6A a ovládač TB6560, ktorý som použil na NEMA 23 dokáže pracovať s max. prúdom 3A.
Ako reduktor som použil reduktor zo štartéra v podobe planétovej prevodovky. Tu je stály prevod 4:1. Teraz má už aj malý motor dostatočný krútiaci moment na to, aby vládal pohybovať osou Z.
Po odskúšaní všetkých funkcii som bol spokojný so svojou prácou. Demontoval som všetky diely, obrúsil rám a natrel som ho základnou farbou a následne som ho nastriekal vrchnou striebornou farbou. Po vyschnutí farby som frézku opäť zmontoval.


Medzi posledné práce, čo som robil patrilo rezanie a montáž plexiskla, plechov a ostatných krytov.
Skôr ako som začal so samotným zapájaním, rozložil som si jednotlivé komponenty na plastovú dosku, kde som ich prikrútil. Postupne som začal prepájať jednotlivé časti. Na tejto doske sa nachádza zdroj jednosmerného napätia (12V/ 5A), mikrokontrolér Arduino Mega 2560, 4x relé, 3x ovládač krok. motora TB6560.
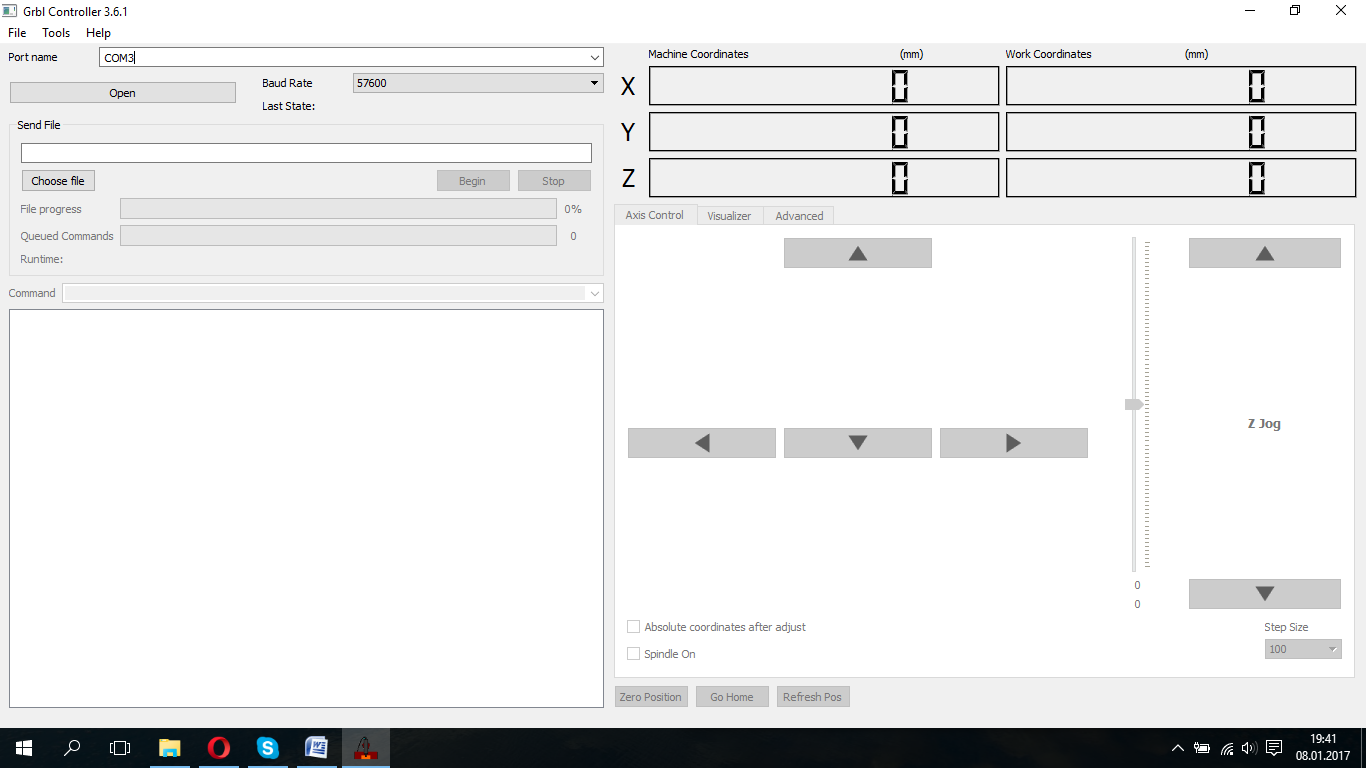
Prvé spojenie mikrokontroléra s počítačom bolo dosť náročné, keďže sa moc do sietí nevyznám, no napokon som to zvládol. Teraz pracujem už len v programe „GRBL controller“, kde ovládam jednotlivé osi manuálne, spúšťam vreteno alebo tu môžem vložiť „G-kód“, ktorý dokáže ovládať jednotlivé osi a spúšťať vreteno podľa programu a tak vytvoriť súčiastku, na ktorú bol tento kód napísaný.
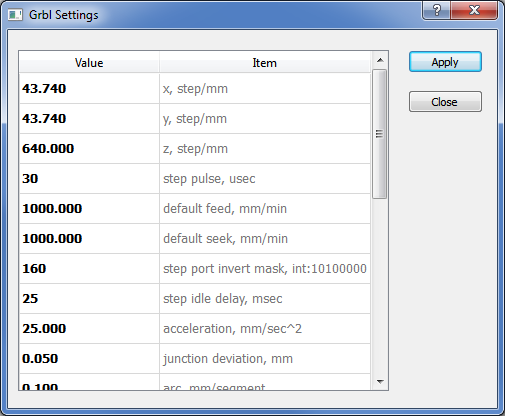
Samotné nastavenie parametrov som robil v „GRBL controller-y“. Tu si môžem nastaviť dĺžku kroku motora, dĺžku impulzu, akceleráciu, rýchlosť posuvu,...
Uvedenú frézku som si vyhotovil sám, pričom jednotlivé komponenty som si kúpil. Stroj je praktický, má jednoduché ovládanie, tvorba programu je podobná ako sme sa učili na našej škole. Frézka je prenosná, malých rozmerov.
Súčasťou frézky sú aj niektoré bezpečnostné prvky. Celá je okrytovaná, takže dnu by nemali vniknúť cudzie predmety a je zabránené aj úrazom a poraneniam frézou. Dnu sa dá dostať len cez predné výklopné dvere z plexiskla. Tie sú chránené koncovým rozpínačom, takže po otvorení dverí sa celá fréza okamžite zastaví. Ďalej sa na prednej strane nachádza tlačidlo CENTRAL STOP, ktoré rovnako po stlačení zastaví celú frézu.
Na základe týchto skutočností uvedená frézka by mohla slúžiť na výučbu základov programovania CNC strojov, nakoľko podobné stroje na trhu sú finančne náročné pre odborné školy. Z tohto dôvodu by som si chcel založiť firmu na zhotovovanie takýchto jednoduchých CNC strojov pre odborné školy ale aj podobných jednoúčelových strojov pre firmy.
S touto frézkou som len na začiatku ale postupne by som ju chcel zdokonaliť. Začal som s konštrukciou malého sústruhu, ktorý by som vložil do tejto frézky. Miesto frézy by som namontoval držiak na sústružnícky nôž a pomocou rýchlospojky pripojil vreteno sústruhu k počítaču, aby som mohol regulovať otáčky skľučovadla. A tak by som mohol obrábať aj valcové, guľové a čelné plochy.