




Cieľom našej práce bolo navrhnúť a zostrojiť konštrukčnú a elektronickú časť pre funkčnú 3D tlačiareň a tak vytvoriť funkčný model 3D tlačiarne. Pri jej výstavbe sme narazili na rôzne problémy, ktoré sa nám celkom podarilo vyriešiť. Chceli by sme zároveň aj dokázať, že aj keď sa jedná o náročný projekt, že to dokáže zvládnuť aj žiak strednej školy. Ďalším z cieľov našej práce bolo rozšíriť túto tematiku medzi žiakov, ktorí sa raz taktiež môžu podujať na zlepšení a vývoji tejto problematiky a techniky. A že už nie len bohatí si môžu dovoliť niečo tak užitočné, ale že sa to dá zostrojiť aj v domácom prostredí. Logicky sa začalo pracovať najprv na konštrukčnej časti pretože tá je telom 3D tlačiarne. Akonáhle bola konštrukcia hotová vdýchli sme jej dušu. Zo začiatku to bolo jednoduché, ale po pár nastaveniach nasledovali 2 dni frustrácie prečo nefunguje tak ako má. Ďalšou z úloh bolo zvoliť program, za pomoci ktorého bude naša tlačiareň aj reálne pracovať.
A) KONŠTRUKČNEJ ČASTI
Predtým, než sme začali vyrábať jednotlivé časti, najskôr sa musela navrhnúť konštrukcia, ktorá by bola stabilná a zvládnuteľná na výrobu. Po navrhnutí všetkých potrebných častí sa musel zvoliť vhodný materiál, ktorý by bolo možné zohnať za primeranú cenu, aby mal požadované mechanické vlastnosti a nie príliš zložité opracovanie. Práve preto sa po uvažovaní vybral, ako materiál na výrobu konštrukcie preglejka a materiál na vodiace a závitové tyče antikor.
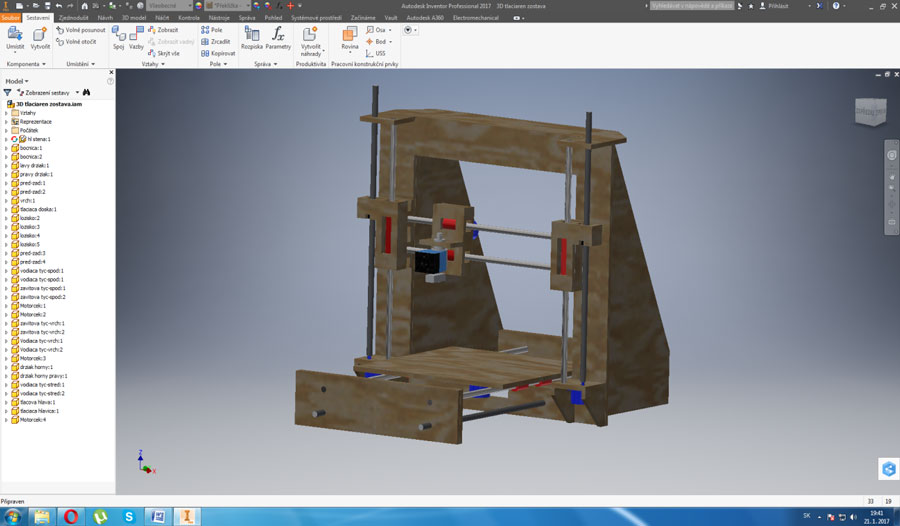
Výkresová dokumentácia sa robila v programe Autodesk Inventor 2017, ktorú sme si stiahli z oficiálnych stránok vydavateľa. Pomocou výkresovej dokumentácie sa zistili nedostatky v konštrukcii, ako napríklad zle navrhnuté dĺžky dielcov a včas sa odstránili.
Po navrhnutí celej konštrukcie a zistení potrebných komponentov a dielcov sa začalo nakupovať a objednávať jednotlivé súčiastky, spojovacie materiály a samozrejme samostatný materiál na výrobu konštrukcie. Niektoré súčiastky bolo nutné objednať cez internet, pretože ich nebolo možné zakúpiť v lokálnych obchodoch.
Pred samostatným opracovaním materiálu bolo nutné vyrobiť prostredie na presné opracovanie preglejky. Vytvoril sa z pár dosiek základný stolček, kde sa zo spodnej časti pripevnila vypilovačka, a tak sa mohlo dosiahnuť presnejšie vypilovanie menších a zložitejších častí. Ďalej sa použila stolová brúska, podomácky vyrobená z motora starej práčky a vŕtačka so stojanom na upevnenie.


B) Príprava elektroniky
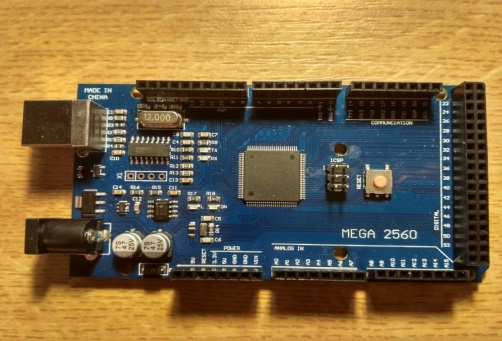
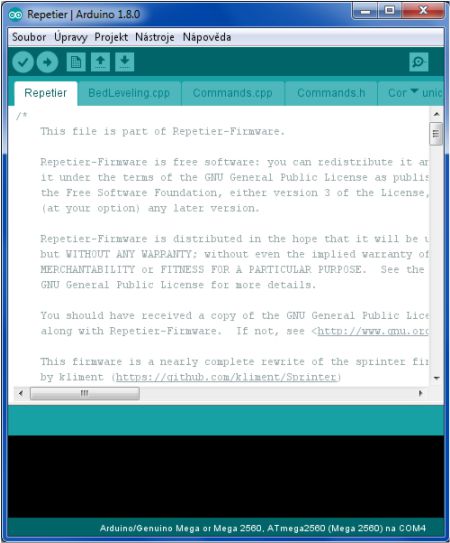
Počas toho ako sa konštruovalo telo 3D tlačiarne. Sme sa zoznamovali s mikropočítačom Arduino Mega 2560 a jeho vývojovým prostredím. Taktiež sa upravili krokové motory. Ako riadiaci hardware sme zvolili mikrokontroler Arduino Mega 2560, pretože je najpoužívanejší u tohto typu 3D tlačiarni. Slúži na riadenie a komunikáciu s PC. Toto je konkrétne lacnejšia neoriginálna verzia.
Programovanie prebieha cez software Arduino IDE. Cez tento software sa overila funkčnosť hardware pomocou jednoduchého programu, ktorý rozblikal vopred zapojenú LED.
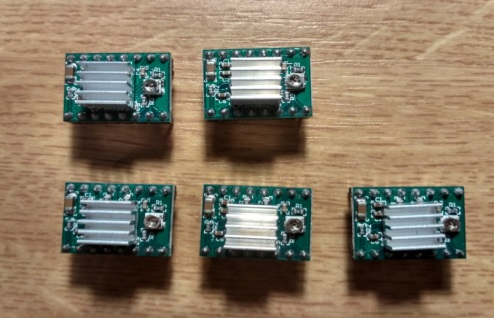
Je rozširujúci plošný spoj pre arduino mega 2560. Je špeciálne navrhnutý tak, aby sa naň zmestila všetka potrebná elektronika pre 3D tlačiareň za nízku cenu. Do tejto dosky sú zapojené všetky komponenty 3D tlačiarne. Na riadenie krokových motorov je nutné do dosky zapojiť ešte drivery A4988. K nim sú chladiče pretože sa zvyknú prehrievať.
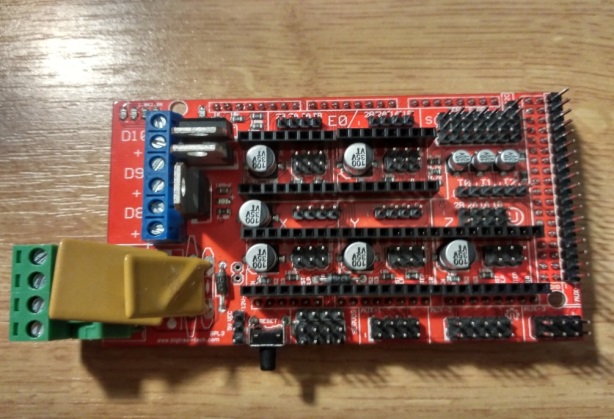
Ako zdroj sme zvolili upravený zdroj zo starého PC.
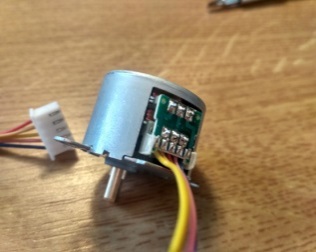
Pohyb po osiach zabezpečujú 4 krokové motory, ktoré sú v originálnom vyhotovení unipolárne. Keďže RAMPS 1.4 je konštruovaný iba na bipolárne motory, bolo ich potrebné prerobiť.
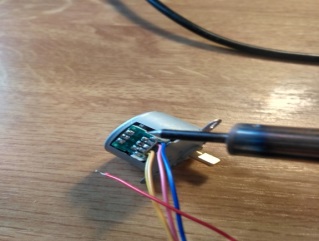
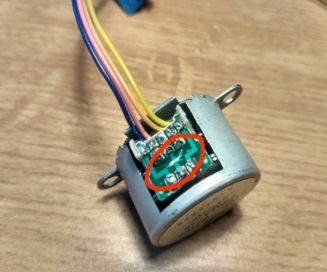
Úpravu unipolárneho krokového motora na bipolárny vykonávame úpravou zapojenia krokového motora a úpravou jeho dosky plošného spoja.
Pod modrým plastovým krytom sa nachádza doska plošného spoja, na ktorej sa vykonávajú úpravy. Celá úprava prebieha v 3 krokoch. V prvom kroku sa odstráni červený vodič, pomocou spájkovačky. Následne sa prereže spoj v mieste prepojenia dvoch cievok. Ako posledný krok je zmena poradia vodičov na ružový, oranžový, žltý a modrý.
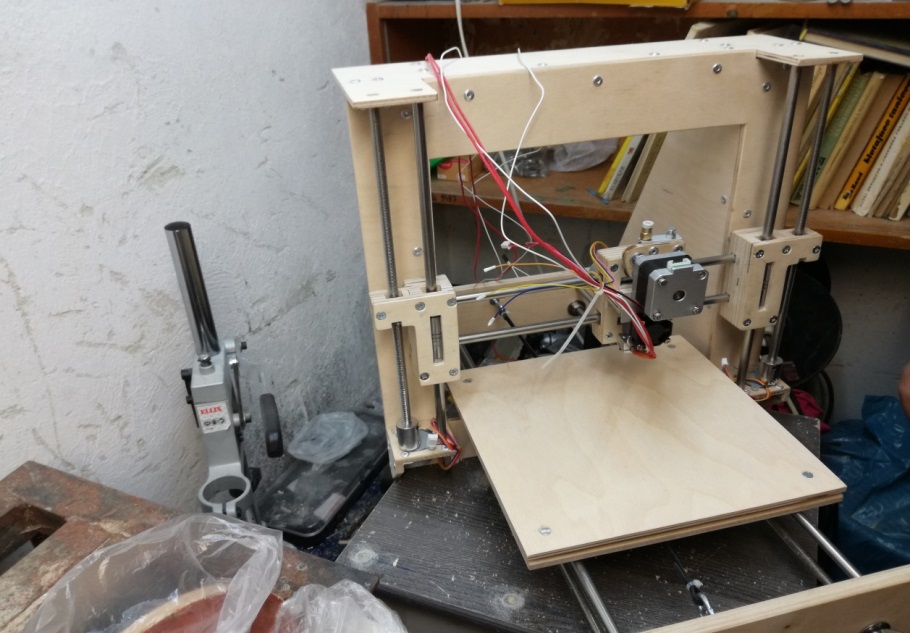
Rám sa navrhol a vyrobil podľa vlastných navrhovaných rozmerov. Jeho najväčšie rozmery sú 370x370 (mm). Bolo treba najskôr opatrne navŕtať diery a následne použiť vypiľovačku na vypílenie odpadu. Rám je základným prvkom, a tak bolo treba čo najpresnejšie opracovať každé miery a časti.
Držiaky sú ďalšou dôležitou časťou celej 3D tlačiarne, pretože nielenže zabezpečujú pohyb v smere osi Z, ale zároveň držia aj tlačovú hlavu. Bolo potrebné ich čo najpresnejšie navrhnúť, aby boli rovnobežné ako aj vodiace, tak zároveň aj závitové tyče.
Tlačová hlava zabezpečuje to, aby sa materiál natavil, a tak sa začal formovať 3D objekt. Ďalšou jej úlohou je pohyb v smere osi X. Je spojená s bočnými držiakmi pomocou dvoch vodiacich tyčí a pohyb zabezpečuje motorček pripevnený zo zadnej časti tlačovej hlavy.
Je to doska pohybujúca sa v smere osi Y a pohyb zabezpečuje taktiež motorček pripevnený zo spodnej časti dosky a dve vodiace tyče, pod ktorými sú umiestnené dve závitové tyče, ktoré prechádzajú naprieč celou konštrukciou v spodnej časti rámu, a tak zabezpečujú stabilitu 3D tlačiarne.
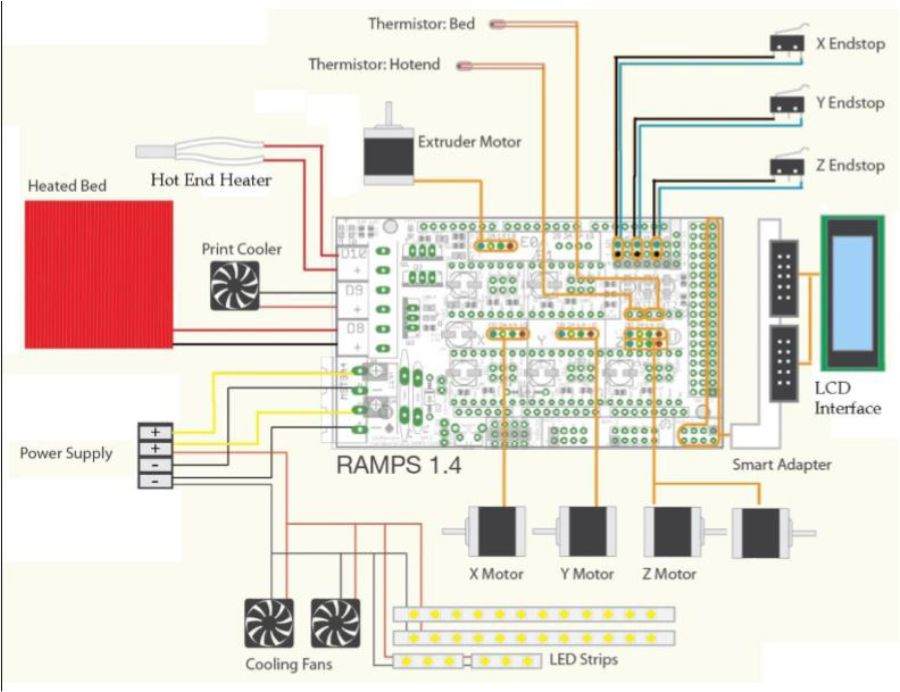
Pred zapojením krokových motorov do RAMPS 1.4 bolo potrebné predĺžiť ich vodiče aby s dostatočnou vôlov dosiahli na miesto upevnenia RAMPS 1.4. Zapojenie komponentov sme vykonali podľa schémy ktorú využívajú RepRap 3D tlačiarne (Obr. 20). V schéme sa nachádzajú aj komponenty, ktoré naša tlačiareň neobsahuje kvôli zníženiu jej nákladov, ale to jej nebráni v bezproblémovom chode.
Pri montáži sa narazilo na problém zo spájaním jednotlivých súčiastok, a tak sa musel vymyslieť iný spôsob spájania, než bol pôvodne plánovaný. Súčiastky sa spájali pomocou lepidla a skrutiek s maticou na spojenie hlavnej konštrukcie a ostatné časti 3D tlačiarne pomocou matice a skrutiek, aby sme zabezpečili dobrú rozobrateľnosť a vymeniteľnosť samostatných dielcov. Celá konštrukcia má otvorenú formu, a teda je vidieť, kde sú ktoré dielce umiestnené a ako pracujú počas činnosti.
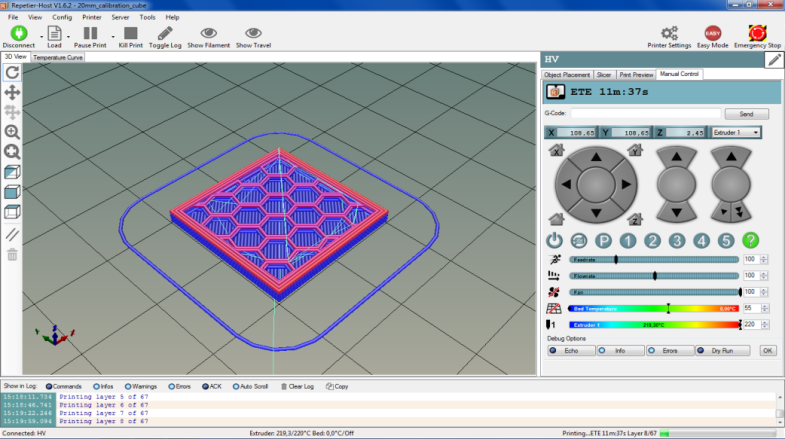
Ako riadiaci software sme zvolili program Repetier. Veľkú váhu malo jeho rozšírenie, množstvo návodov a taktiež to že je zadarmo.
Zistili sme že 3D tlačiareň je veľmi komplexné zariadenie. Zdá sa zložitá, ale výroba, zostavenie a zapojenie sme vykonali v postupných krokoch, ktoré vo výsledku vytvorilo zariadenie.Počas návrhu a montáže sa narazilo na viacero problémov ako napríklad nájdenie pracovného miesta, výber materiálu a komponentov, vymyslenie vhodného spôsobu montáže, rôzne poruchy strojov a nástrojov a ďalších, ktoré sa podarilo úspešne vyriešiť. Počas zapájania sme narazili na radu problémov ako boli napríklad krátke vodiče od krokových motorov, prehrievanie krokových motorov, nekvalitný materiál na tlačenie a veľa ďalších. Nastavenie pracovných posuvov sme vykonávali veľmi precízne a zopakovali sme ho niekoľkokrát aby sme docielili čo najväčšiu tvarovú presnosť. Naučili sme sa, aké dôležité je dbať na detaily, a že všetko so všetkým súvisí, ako keď sa musela prepracovať polovica návrhu kvôli jednej nesprávnej hodnote v návrhoch.
Táto práca nám celkovo pomohla porozumieť 3D tlači a jej problematike taktiež nám pomohla lepšie porozumieť mikrokontrolérom a elektromechanickému riadeniu pohybov pomocou krokových motorov. Táto práca nám dala toho veľa hlavne do ďalšej praxe. Teraz budeme viac rozumieť zariadeniam, konštrukciám a ich funkčnosti. Celkové náklady na výrobu konštrukcie tvorili sumu menej než 45€ plus cena elektroniky pohybujúcej sa tiež okolo sumy 45€,a preto si myslíme, že suma pod 100€ je minimálna cena oproti cenám komerčných 3D tlačiarni pohybujúcich sa na trhu.

3D tlačiarne tvoria veľkú časť budúcnosti, a tak ako sa stali osobné počítače súčasťou bežného života, tak sa stanú aj tieto tlačiarne. Chceli sme poukázať na to, že navrhnúť a skonštruovať si vlastnú 3D tlačiareň nie je obzvlášť náročné, a že je vhodná do každej domácnosti. Cenovo je výhodnejšie si ju vyrobiť.
Stačí si naštudovať a pozrieť rôzne konštrukcie a návrhy na internete od rôznych výrobcov a dá sa to zvládnuť. Sú veľmi užitočné na výrobu originálnych biomedicínskych pomôcok ale aj výrobu lacných prototypov. Taktiež budú mať nezastupiteľné miesto vo vesmírnych programoch, pretože je lacnejšie si vyrobiť predmety mimo zeme, v budúcnosti moduly, celé stanice a dokonca aj základne na iných planétach.
Naša vlastná originálna 3D tlačiareň je veľmi lacná na výrobu pretože je vyrobená z bežných a dostupných materiálov, využíva voľne dostupný software s veľkou komunitou používateľov, ktorý v prípade problému môžu pomôcť svojimi skúsenosťami a postrehmi. V budúcnosti sa skúsime viac „pohrať“ s nastaveniami, aby sa dosiahla čo najväčšia rýchlosť tlače pri zachovaní kvality výtlačku. A skúsili by sme aj iný riadiaci software. Tento náš výrobok je ukážkou našich vedomostí, zručností a skúseností ktoré sme sa naučili počas štúdia na strednej škole.
Finálny dizajn 3D tlačiarne sa od ostatných odlišuje tým, že sa použili bežne dostupné časti, zatiaľ čo väčšina ostatných aj podomácky vyrobených tlačiarní obsahovala už veľa vopred vytlačených prvkov, ďalej v odlišnosti spájania jednotlivých častí za použitia nitov a celkového prevedenia konštrukcie 3D tlačiarne. Ďalej sme museli vymyslieť spôsob posúvania náplne a uchytenia motorčeka, čo sa nám aj podarilo pomocou vlastných nápadov.
