




Už ako chlapec som sníval že budem raz budem smetiarom, vodičom autobusu či pretekárom ale potom sa vo mne objavil talent vytvoriť niečo čo to ešte nebolo. Mojim cieľom je vytvoriť model solárneho automobilu v mierke 1:18 a tým poukázať ,že svet alternatívneho pohonu má v budúcnosti svoje miesto. Môj model je pripravený na každodennú prevádzku bez toho aby som doňho čokoľvek natankoval či ho napájal z elektrickej siete. Ako je to možné? Môj model poháňa inteligentný solárny panel a to znamená, že ako náhle je model v kľudovom režime na svetle ,model sa začne nabíjať pomocou solárneho panela. Energia sa zhromažďuje vo veľkokapacitnej batérii. Počas prvých skúšok či takéto niečo môže fungovať s bežným autíčkom na diaľkové ovládanie vzhľadom na moje elektrotechnické zručnosti som sa našťastie s neúspechom nestretol. Prvotne bol model odskúšaný na powerbanku čo je tzv. externá prenosná batéria. Po tomto úspechu nasledovalo zakúpenie vhodného solárneho panelu. Pri prácach s týmto modelom som sa samozrejme stretol aj s komplikáciami napr. rozoberať lacné autíčko vyrobené v Číne nie je také ľahké ako to vyzerá, musíte však myslieť na to, že ho chcete aj poskladať. Táto práca bola pre mňa prínosom po každej stránke a v budúcnosti by som sa chcel venovať niečomu takémuto, vyvíjať nové veci, ktoré by sa na trhu uživili, jediní, ktorý ma nebudú mať radi budú momentálne výrobcovia tužkových batérii.
Elektromobil alebo skrátene EV je automobil používajúci pre svoj pohon elektrickú energiu. Ako zdroj energie používa obvykle akumulátor, ktorý musí byť pred jazdou nabitý z externého zdroja. Od kapacity akumulátora závisí dojazd elektromobilu.
Hlavnou výhodou elektromobilov je ich účinnosť. Prevod energie elektrickej na mechanickú je možné dosiahnuť s účinnosťou až 90 % (v prípade asynchrónneho motora) oproti 25–34% účinnosti spaľovacieho motora. Celková účinnosť pohonu samozrejme závisí aj od účinnosti výroby elektriny pre pohon z primárneho zdroja a energetickej účinnosti použitých akumulátorov resp. palivových článkov (táto sa pohybuje okolo 50–80 % podľa použitej technológie – olovo, NiMH, Li-ion, Li-pol). Na rozdiel od bežného automobilu je však možné využiť proces brzdenia tzv. rekuperáciou.
Nezanedbateľnou výhodou je, že elektromobily neprodukujú svojou činnosťou výfukové plyny. Technický prielom vo vývoji elektromobilov naštartoval rozvoj elektroniky a riadiacich systémov, rozvoj nových typov akumulátorov (napr. SCIB batérií), ale hlavne rýchlym nárastom cien energie, palív - hlavne ropy a teda aj benzínu. Výhodou je aj jednoduchšia konštrukcia automobilu - pohon môže byť umiestnený priamo v kolesách, riadiaca elektronika a akumulátorový set v podlahovej časti. Karosériu teda možno konštruovať variabilnejšie na rovnakej podvozkovej báze.
Hlavnou nevýhodou je akumulátor, ktorý je pri súčasnom stave techniky objemný, príliš ťažký, má malú životnosť a pridlhé doby nabíjania. Odbúranie používania fosílnych palív zasa zaťažuje systém výroby energie, ktorý by masové nasadenie elektromobilov nezvládol. Riešením je použitie alternatívnych palív spáliteľných v palivových článkoch priamo prevádzajúcich chemickú energiu na elektrickú. Tieto palivá sa však tiež neťažia, ale vyrábajú a na ich výrobu je opäť potrebné značné množstvo elektrickej energie. Na masovejšie nasadenie elektromobilov si ešte budeme musieť počkať, ale rastúce ceny ropy na svetových trhoch pravdepodobne čoskoro "zefektívnia" výrobu elektromobilov.
Písal sa rok 1881, keď sa elektricky poháňaný automobil prvýkrát oficiálne ukázal verejnosti. Trojkolesový „povoz“ predstavil fyzik Gustave Trouvé na parížskej výstave Expositon d´Electricité a pod jeho kapotou sa ukrývalo šesť nabíjateľných olovených batérií. Trouvé však ani zďaleka nebol prvý, kto postavil elektricky poháňaný automobil, hoci skutočné prvenstvo nemožno jednoznačne určiť. Prvý zdokumentovaný elektromobil bol model vozidla, ktorý v roku 1828 zostrojil maďarský vynálezca Ánián Jedlík.
Nasledoval Škót Robert Anderson, ktorý niekedy medzi rokmi 1832 až 1839 (presný rok nie je známy) postavil skutočné vozidlo poháňané elektrinou. Rok 1835 priniesol hneď dva elektromobily. Autorom jedného bol holandský vynálezca Sibrandus Stratingh a vyrobil ho jeho asistent Christopher Becker, druhý vznikol vo Vermonte, v garáži Thomasa Davenporta. Nasledoval Raketový nástup. Výraznejší rozmach vo výrobe a používaní elektromobilov umožnil koncom 19. a začiatkom 20. storočia Camille Faure, ktorý vylepšil nabíjateľný akumulátor Gastona Plantého. Obaja svojimi vynálezmi pripravili živnú pôdu pre elektrickú mobilitu, ktorá na vtedajších cestách jednoznačne dominovala. Elektricky poháňané vozidlá v tom čase vytvorili mnohé rýchlostné rekordy. Typickým príkladom je prvý pretekársky automobil La Jamais Contente, ktorý sa na ceste objavil v roku 1899. Dieťa belgického konštruktéra a pretekára Camille Jenatzyho dosiahlo dovtedy nevídanú rýchlosť 105,88 km/h. Rok po Jenatzyho úspechu prišla na scénu legenda automobilizmu Ferdinand Porsche, ktorý ako zamestnanec firmy Lohner na Svetovej výstave v Paríži predstavil svoj prototyp s dvomi elektromotormi.
Niekoľko rokov na to Porsche začal pracovať pre spoločnosť Austro-Daimler a svoje novátorské myšlienky zúročil vo forme hybridného pohonu. Táto kombinácia benzínového motora a dynama pod označením Daimler-Mixte poháňala mnohé moderné autá, okrem iného aj vozidlá berlínskych hasičov. Všetko má svoj koniec a elektromobily napokon z ciest takmer úplne zmizli. Podpísala sa pod to kombinácia viacerých udalostí, ktoré nastali prakticky súčasne. Objavenie nových nálezísk ropy v 20. rokoch znamenalo prudký pokles cien palív. Kvalita ciest sa neustále zlepšovala, čo prinieslo dopyt po vozidlách s väčším dojazdom. A napokon prišla inovácia vo forme elektrického štartéra, ktorý v roku 1912 zostrojil Charles Kettering a zbavil tak motoristov únavného štartovania kľukou. A tak sa stalo, že v 30. rokoch elektromobily prakticky vymreli. Záujem o tento typ mobility čiastočne oživili veľké ropné krízy v 60. a 70. rokoch.
Ford, General Motors a American Motor Company síce zvažovali vývoj kompaktného elektrického modelu, avšak na aspoň minimálny trhový úspech až do nedávnej minulosti neverili. V tom čase prišlo viacero pilotných projektov. Victor Wouk, známy ako „Otec hybridu,“ v roku 1972 vyvinul prvé skutočne hybridné vozidlo. Na rozdiel od Porscheho hybridu z 19. storočia totižto nepoužil dynamo, ale elektrický motor. Tento pohon začal GM montovať do modelu Buick Skylark v rámci vládneho programu „Čisté vozidlo“.
Príčinou minulého neúspechu elektromobilov bol predovšetkým obmedzený dojazd. A tento problém vytrval dodnes. Najväčšou výzvou pre automobilky aj inžinierov je aj v súčasnosti kapacita akumulátorov. Automobilky preto spojili sily s výrobcami akumulátorov s cieľom zefektívniť uchovávanie energie natoľko, aby to umožnilo predĺžiť dojazd súčasných elektromobilov na úroveň klasických automobilov so spaľovacím motorom.
Ďalším problémom je zatiaľ ešte nedostačujúca infraštruktúra nabíjacích staníc, ktorej budovanie si vyžaduje obrovské investície. Vzhľadom na už spomínaný obmedzený dojazd musí byť sieť staníc dostatočne hustá, predovšetkým pre vozidlá výlučne s elektrickým pohonom. Zatiaľ majú kompaktné EV modely uplatnenie hlavne v mestách a prímestských oblastiach, kde sú dopravné zápchy a problémy s parkovaním každodenným javom. Automobilky v posledných mesiacoch ako na bežiacom páse predstavujú elektrické aj hybridné modely. Verejnosť je však zatiaľ nedôverčivá. Dôvod je jednoduchý – cena. Suma, ktorú si výrobcovia týchto modelov pýtajú je v porovnaní s klasickými spaľovacími modelmi privysoká. No pre svet iná alternatíva ako vymyslieť nový typ pohonu neexistuje. USA ako najväčší odberateľ ropy platí za ňu denne takmer pol miliardy dolárov. A ťažba prvýkrát po desaťročiach začína klesať.
Pochopiteľne, na svete ešte stále existujú dostatočné zásoby ropy, no ekonomicky využiteľné náleziská sa vyprázdňujú. Odborníci varujú, že súčasný trend spotreby je dlhodobo neudržateľný a deň, keď vyťažíme posledný barel sa pomaly, ale isto blíži. Jediným riešením sú alternatívne spôsoby pohonu. A je úplne jedno, či to bude elektrina, vodíkové články alebo niečo úplne nové a revolučné, čo sa ešte len nachádza v hlave šikovného vynálezcu. Ak odhliadneme od všetkých problémov, s ktorými známe alternatívne pohony zápasia, to jediné, čo im bráni preraziť, je v skutočnosti vysoká cena. A aj to sa časom zmení.
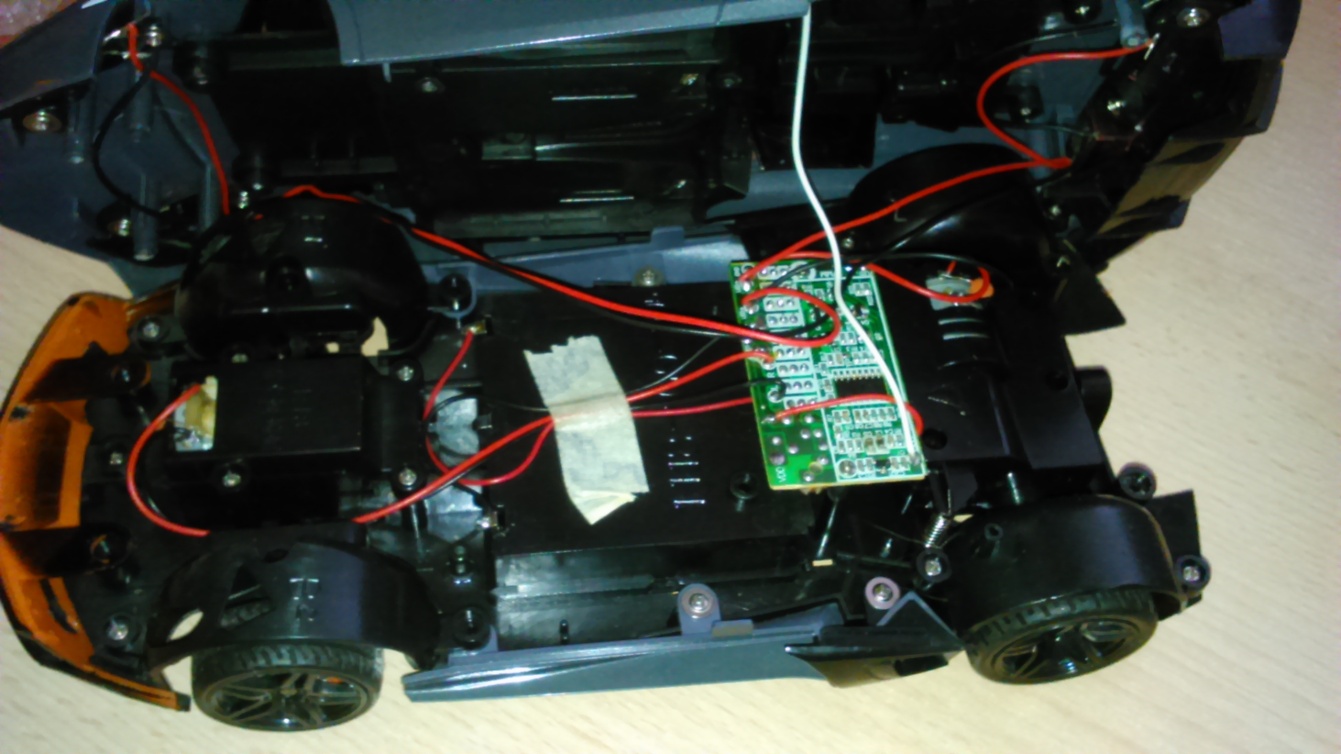
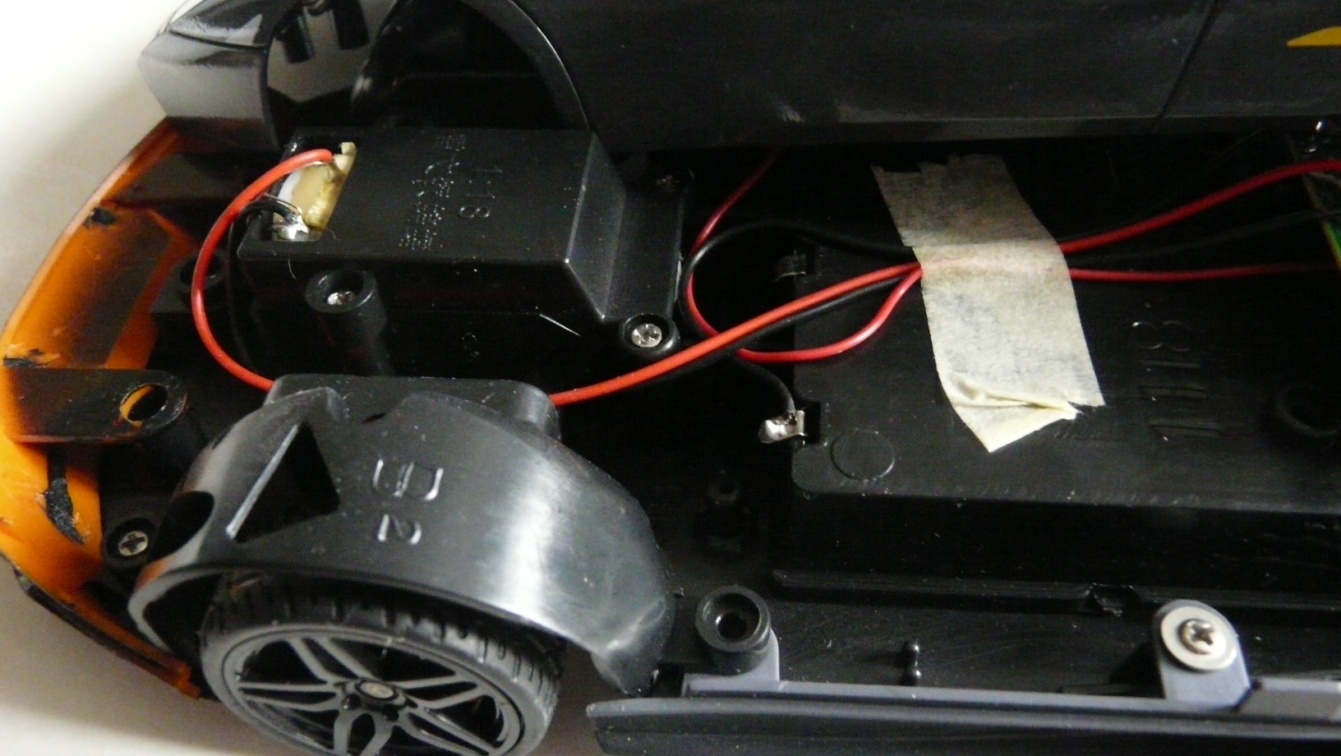
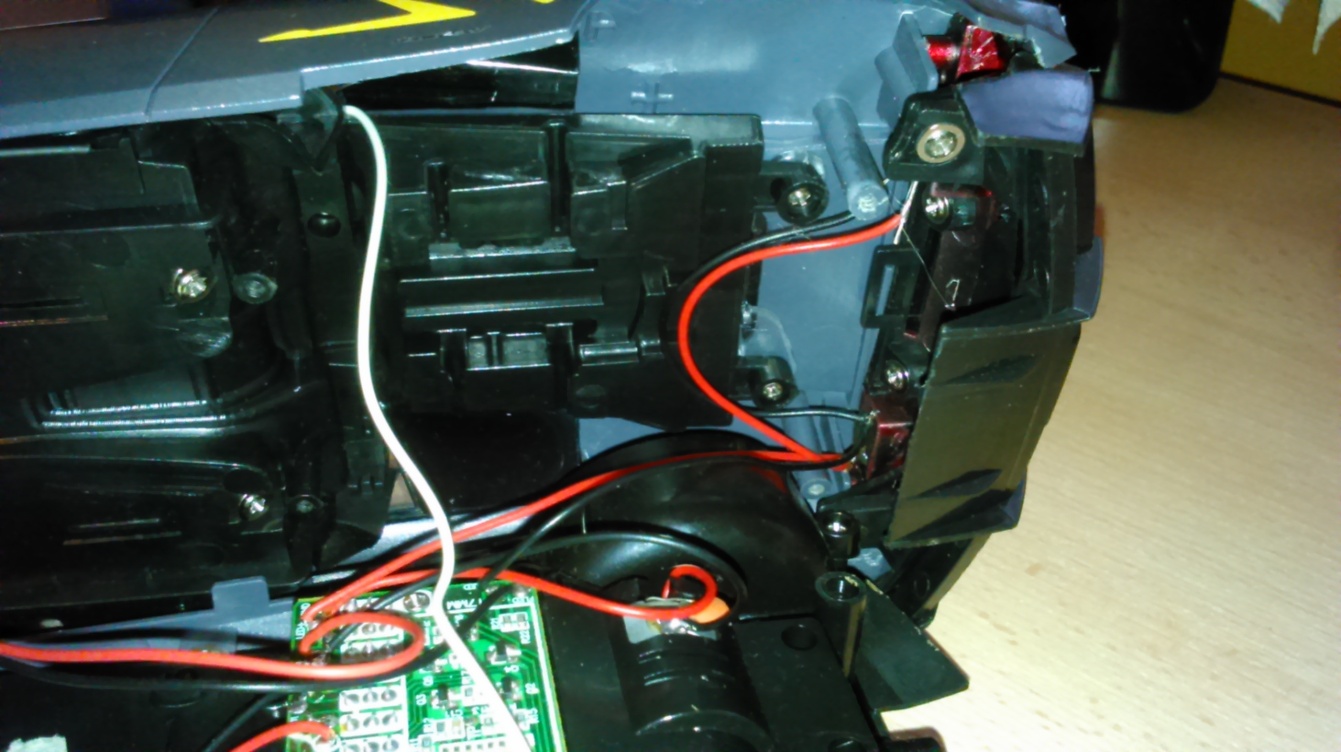
Na začiatku celého projektu bolo dôležité si stanoviť cieľ. Mojim cieľom bolo prerobiť bežný a lacný model auta na diaľkové ovládanie, na auto na solárny pohon. Ďalej som upravil kompletnú kabeláž vozidla ,ktorá bola nekvalitná ale vzhľadom k nákupnej cene vozidla sa nič iné nedalo čakať. Potom som upravil svetlomety tak aby vpredu vyznievali až na xenónový efekt a vzadu pre toto vozidlo klasické led svetlá. Nakoniec som upravoval karosériu pre montáž solárneho panelu na vozidlo. Vyvŕtal som dieru pre kábel, ktorý vedie k napájaniu motorčeka vozidla. Na vrchu vozidla som zvolil bezskrutkový spoj a to suchý zips prilepený na strechu vozidla, druhá časť suchého zipsu bola prilepená na solárny panel. Týmto je model naďalej ľahko rozoberateľný. Touto montážou sa jemne zhoršila aerodynamika vozidla, na druhej strane má teraz vozidlo vyšší výkon vďaka výkonnému solárnemu panelu, ktorý dodáva viac energie do motorčeka vozidla. Môžem čestne prehlásiť že vynaložené finančné prostriedky sa oplatili a zužitkovali a dokonca sa časom aj vrátia na ušetrených peniazoch za kúpu či dobíjanie batérii.

Najväčším strašiakom tohto projektu bolo rozoberanie vozidla keďže sa jedná o lacný výrobok čínskej firmy. Model je len niekde prichytený skrutkami, väčšinu rámu tvoria plastové zarážky. Model som rozoberal postupným podpáčením jednotlivých rozoberateľných plastových dielcov sadou skrutkovačov pre modelárov a samozrejme vyskrutkovaním skrutiek, ale tých model obsahuje len 6, ak sa bavíme o rozoberaní karosérie. Vyžadovalo to trpezlivosť, veľký cit a pevné nervy. Po nejakom čase sa to podarilo a čakala ma spleť našťastie farebne odlíšených káblov. Aspoň póly plus a mínus boli jasné. Aj keď sa model otváral s citom lacné čínske kábliky poodpadávali z plošného spoja, takže nastala výmena skoro všetkých káblov za kvalitnejšie. Po prekontrolovaní všetkých káblov nasledovalo vytvorenie diery do modelu pre kábel solárneho panelu a jeho následné pripojenie k pohonnej jednotke. Samotným srdcom autíčka je jednoduchý motorček ktorý obsahuje len plastové kolieska a málo kvalitných dielov, ale rýchlosťou prekvapuje. Na upevnenie solárneho panelu k modelu som použil suchý zips.